TOKYO, Sept. 29, 2021 /PRNewswire/ -- University of Electro-Communications publishes the September 2021 issue of UEC e-Bulletin
September 2021 issue of UEC e-Bulletin
http://www.ru.uec.ac.jp/e-bulletin/
The September 2021 issue of the UEC e-Bulletin includes a video profile of UEC Associate Professor Shouhei Kidera where he describes his recent research on "Radar-based human recognition for self-driving cars".
The Research Highlights are Radar-based human recognition for self-driving cars,' Shouhei Kidera; and 'Getting the most out of quantum systems,' Jun Suzuki.
The Topics column is an interview with Yoshihiro Nakata, Associate Professor at the School of Informatics and Engineering, Department of Mechanical and Intelligent Systems Engineering, offering insights into 'creating robots to coexist in harmony with humans in the real world'.
The News and Events describes research by Hiroshi Kohsaka on the 'relationship between the speed at which insects move and the environmental temperature'.
Research Highlights
Recognition technology: Radar-based human recognition for self-driving cars
http://www.ru.uec.ac.jp/e-bulletin/research-highlights/202109/a.html
Self-driving car technology requires detectors capable of sensing a car's environment, also in situations of limited visibility like bad weather conditions. Radar-based sensors have emerged as an essential component of driver assistance systems and self-driving vehicles, as they can robustly distinguish nearby pedestrians and other traffic-relevant objects. Apart from being applicable in bad weather, artificial recognition systems also need to be capable of dealing with so-called non-line-of-sight (NLOS) situations, when the line of sight between detector and object is obstructed. In traffic, NLOS situations occur when pedestrians are blocked from sight; for example, a child behind a parked car, about to run suddenly into the street. Now, Shouhei Kidera from the University of Electro-Communications and colleagues have developed a radar-based detection method for recognizing humans in NLOS situations. The scheme is based on reflection and diffraction signal analysis and machine-learning techniques.
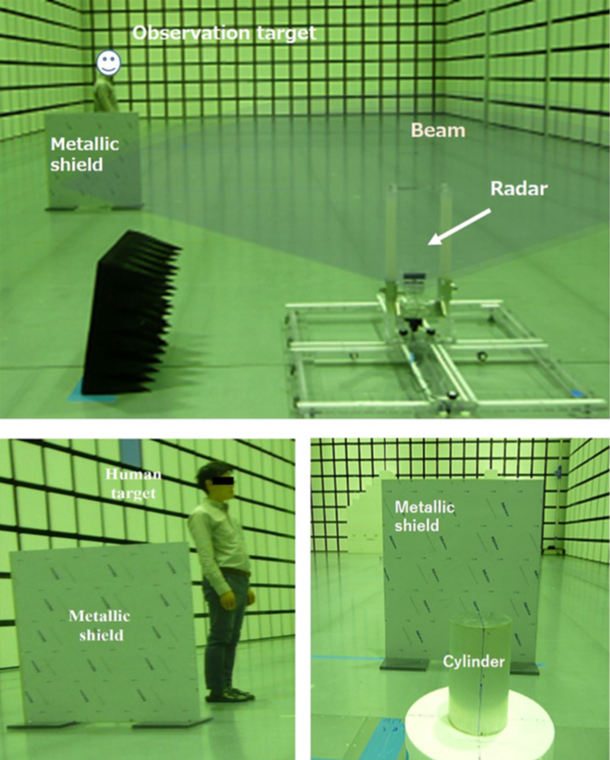
The researchers performed radar experiments in an anechoic chamber (a room completely absorbing reflections). The working principle of a radar is to send radio waves to a target object and then analyse the reflected waves (e.g. changes in frequency), which provides information about the object, such as its distance to the source.
Kidera and colleagues put a metallic plate in the chamber so that a NLOS situation arises when the target object is behind the plate from the radar's point of view. The radar's frequency was 24 GHz, and two target objects were used in the experiments: a 30 cm long metallic cylinder, and a human wearing light clothes. Three regimes were investigated: complete NLOS, partially NLOS (target object positioned at the border between the NLOS and the LOS zone) and complete LOS. The signals received by the detector were intrinsically different for the metallic cylinder and the human. Even if a human stands still, breathing and small movements related to posture control cause changes in the reflected wave signals. The scientists found that the differences are enhanced by diffraction effects: the 'bending' of waves around the edges of the metallic plate.
The researchers applied a machine-learning algorithm to the reflection and diffraction signals in order to let their sensing device learn the difference between a human and a non-human object. A recognition rate up to 80% was achieved. They also performed experiments with an actual car as the shielding object, which led to similar results and additional understanding of the dependence of the recognition success rate on the radar's position relative to the target. Also, by carrying out additional experiments with a human performing a stepping motion, the scientists were able to recognize whether a human is standing still or walking, even in complete NLOS situations.
The results of Kidera and colleagues signify an important step forward to feasible self-driving car technology. Of course, in order to fully control realistic situations, more research is needed. Quoting the researchers: " there should be further investigation using other classifiers or features, which is our important future work".
Figure link http://www.ru.uec.ac.jp/topics/assets_c/202109/img1.jpg
{kind=link}
Caption: Experimental setup used by Shouhei Kidera and colleagues. [Fig. 1b from the paper]
Reference
Jianghaomiao He, Shota Terashima, Hideyuki Yamada, and Shouhei Kidera, Diffraction Signal-Based Human Recognition in Non-Line-of-Sight (NLOS) Situation for Millimeter Wave Radar, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 14, 43704380 (2021).
URL: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9405398 DOI: 10.1109/JSTARS.2021.3073678
Quantum state estimation
Getting the most out of quantum systems
http://www.ru.uec.ac.jp/e-bulletin/research-highlights/202109/b.html
Quantitative information about a physical system comes in the form of numbers following from the system's mathematical description equations capturing the physical processes involved. In classical physics, it is in principle possible to retrieve, by means of measurements, the complete information of a system. According to quantum mechanics, however, one can never obtain all information of a system with infinite precision because of the quantum-mechanical uncertainty principle stating that certain pairs of quantities (e.g. momentum and position) cannot be measured simultaneously with absolute certainty.
Also, in quantum mechanics, measurements affect the state of a system, so it is actually impossible to determine a system's state without prior knowledge about it. Quantum state estimation is the statistical framework addressing the question how to obtain the most but, unavoidably, still incomplete information about a quantum system from measurements.
Now, Jun Suzuki from the University of Electro-Communications and colleagues have extended the framework to include the situation of so-called 'nuisance parameters': parameters that are not really of interest but do affect the precision of estimations of other parameters that are of interest.
Nuisance parameters have been extensively studied in the context of classical physics and statistics. A key theoretical result is the Cramr-Rao inequality, providing a lower bound on the variance of the estimated value of a parameter. (The variance of a parameter is the expectation value of the square of the deviation from its mean value.) Suzuki and colleagues derived a scheme to obtain quantum Cramr-Rao bounds in the framework of quantum state estimation taking the presence of nuisance parameters into account.
After developing the general formalism, the researchers focused on the one-parameter case: the situation where only one parameter is of interest, but one or more nuisance parameters exist alongside. They succeeded in obtaining a straightforward 'recipe' for calculating the ultimate precision limit for the one parameter of interest. They applied their scheme for the description of a noisy quantum clock, as well as that of a so-called 'qudit', a multi-state generalization of a qubit. (The latter refers to a quantum-mechanical two-state system, like the spin of an electron, and is the fundamental concept underlying quantum computing.)
Suzuki and colleagues point out that their findings are relevant for quantum metrology. Quantum metrology essentially deals with estimating, with high sensitivity and high precision, parameters in quantum-mechanical physical processes by utilizing quantum resources. One of the main issues in this field is to perform quantum metrological tasks in a noisy environment; the noise thus depends on unknown nuisance parameters. Quoting the researchers: "Suitable extensions of the tools presented will, therefore, be able to quantify the effects of nuisance parameters in quantum metrology."
Reference
Jun Suzuki, Yuxiang Yang, and Masahito Hayashi, Quantum state estimation with nuisance parameters, J. Phys. A: Math. Theor. 53, 453001 (2020).
URL: https://iopscience.iop.org/article/10.1088/1751-8121/ab8b78 DOI: 10.1088/1751-8121/ab8b78
Researcher Video Profiles
http://www.ru.uec.ac.jp/e-bulletin/researcher-video-profiles/202109/a.html
Shouhei Kidera, Associate Professor Department of Informatics Graduate School of Informatics and Engineering.
Radar-based human recognition for self-driving cars
Shouhei Kidera and his group is focusing on recognizing pedestrians using millimeter wave radarthat enables sensing in darkness, fog, or rainfor self-driving cars. "We use millimeter wave radar because it is effective for recognizing pedestrians even in non-line-of-sight sensing scenarios by exploiting diffraction signals," explains Kidera. "Most other radar based human recognition methods use micro-Doppler analysis. However, this approach needs higher Doppler velocity, temporal, and range resolution. Our approach is based on raw data machine learning, assuming Non-Line-of-Sight (NLOS) scenarios."
Kitera and his colleagues use Frequency Modulated Continuous Wave Millimeter Wave (FMCW MMW) radar with 24 GHz center frequency, 700 MHz bandwidth, and horizontal and vertical beam widths of the radar of 45 degrees and 6.5 degrees, respectively.
In recent research they studied two different types of targets: a metallic cylinder, and a human with static motion and breathing [1].
In a Line of Sight scenario the team compared reflection responses from a human and metallic cylinder. "We obtained Gaussian distribution reflection spectra for a specific range," says Kidera. "We confirmed the temporal variation of the response of a stationary human body in both amplitude and phase, which did not appear in cylinder target. These differences are promising for discriminating between human and metallic cylinders."
Finally, the team investigated support vector machines (SVM) based machine learning using a variety of features with corresponding raw data (Details in the video).
Notably, the results on the recognition rate between human and metallic cylinder and SNR, and showed perfect recognition in LOS or partially NLOS situations. Also, in completely NLOS case, the recognition rate increased to 80 % by exploiting multiple temporal features, even in very lower SNR situations.
Reference
Jianghaomiao He, Shota Terashima, Hideyuki Yamada, and Shouhei Kidera, Diffraction Signal-Based Human Recognition in Non-Line-of-Sight (NLOS) Situation for Millimeter Wave Radar, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 14, 43704380 (2021).
URL: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9405398 DOI: 10.1109/JSTARS.2021.3073678
Website: http://www.ems.cei.uec.ac.jp/index_e.html
Topics
http://www.ru.uec.ac.jp/e-bulletin/topics/202109/a.html
Creating robots to coexist in harmony with humans in the real world
Yoshihiro Nakata, Associate Professor, School of Informatics and Engineering, Department of Mechanical and Intelligent Systems Engineering
"The is extensive research on autonomous robots and androids that look and behave like humans", says Yoshihiro Nakata, an associate professor at the School of Informatics and Engineering, UEC Tokyo. "Ultimately, in order for robots to become an integral and functional part of modern society, they must be able to move freely within everyday social settings alongside humans, without danger or concern. The key to realizing such a society is for robots to be able to "gently interact" with humans without the unnatural rigid movements associated with conventional robots. To achieve a society of "gentle robots" it is necessary to develop new generations of actuator technology. This is the goal of my research. Namely, to develop actuators for powering "gentle and socially acceptable robots."
Nakata's research can be divided into three types: actuators, mechanisms, and humanoid robot research. In actuator research, Nakata and his colleagues have focused on making actuators that mimic the flexibility, power, and agility of human muscles, with the goal creating machines with a gentle touch.
Research on mechanisms he has been trying make a "body that can tolerate various forms of contact from the environment and "feel" the force not via joints but by the whole bodythe goal is to create machines that gently feel such forces.
The third is research theme is on humanoid robots, with the goal of creating robots that can be part of the natural world without feeling the burden on people in society.
"I started research on actuators when I was an undergraduate student," says Nakata. "For flexibility and agility, I developed linear motors as actuators for robots. And since linear motors do not have an intrinsic deceleration mechanism and is direct drive, it is possible to devise actuators with flexibility against external forces, with high response and high accuracy by driving with electromagnetic forces."
Now, since moving to UEC Tokyo in March 2021 Nakata has defined three goals for this research for the development of robots that behave in a human-friendly manner in the real world.
Read morehttp://www.ru.uec.ac.jp/e-bulletin/topics/202109/a.html
News and Events
http://www.ru.uec.ac.jp/e-bulletin/news/202109/a.html
September 28, 2021
Relationship between the speed at which insects move and the environmental temperature
Hiroshi Kohsaka an associate professor at UEC Tokyo, and colleagues report that the speed of movement of fly larvae varies from species to species. Furthermore, they found that larvae in cold regions tend to move slowly, and those in warm regions move faster. These results suggest that environmental diversity has contributed to the evolution of the diverse movement patterns exhibited by animals.
Reference
Yuji Matsuo, Akinao Nose, Hiroshi Kohsaka, Interspecies variation of larval locomotion kinematics in the genus Drosophila and its relation to habitat temperature, BMC Biology 19, 176 (2021). DOI: 10.1186/s12915-021-01110-4
https://bmcbiol.biomedcentral.com/articles/10.1186/s12915-021-01110-4
Figure link http://www.ru.uec.ac.jp/topics/assets_c/202109/img_news1.pngCaption: Summary of research details
Further information
University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 E-mail: [emailprotected] Website: http://www.uec.ac.jp/
About the University of Electro-Communications http://www.uec.ac.jp/
The University of Electro-Communications (UEC) in Tokyo is a small, luminous university at the forefront of pure and applied sciences, engineering, and technology research. Its roots go back to the Technical Institute for Wireless Commutations, which was established in 1918 by the Wireless Association to train so-called wireless engineers in maritime communications in response to the Titanic disaster in 1912. In 1949, the UEC was established as a national university by the Japanese Ministry of Education and moved in 1957 from Meguro to its current Chofu campus Tokyo.
With approximately 4,000 students and 350 faculty members, UEC is regarded as a small university, but with expertise in wireless communications, laser science, robotics, informatics, and material science, to name just a few areas of research.
The UEC was selected for the Ministry of Education, Culture, Sports, Science and Technology (MEXT) Program for Promoting the Enhancement of Research Universities as a result of its strengths in three main areas: optics and photonics research, where we are number one for the number of joint publications with foreign researchers; wireless communications, which reflects our roots; and materials-based research, particularly on fuel cells.
Website: http://www.uec.ac.jp/
SOURCE University of Electro-Communications

See the article here:
- Wolfram Physics Project Seeks Theory Of Everything; Is It Revelation Or Overstatement? - Hackaday [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Elon Musk and Grimes Named Their Baby X A-12, Which Must Mean SomethingRight? - Esquire [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Free Will Astrology - Week of May 7 | Advice & Fun | Bend - The Source Weekly [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Free Will Astrology: May 6, 2020 - River Cities Reader [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Is string theory worth it? - Space.com [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Finding the right quantum materials - MIT News [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Quantum Tunneling Effects, Solving the Schrodinger Equation Bottleneck Recognized as Best Papers by The Journal of Chemical Physics - PRNewswire [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- What Is Quantum Mechanics? Quantum Physics Defined ... [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Quantum Physics Overview, Concepts, and History [Last Updated On: May 6th, 2020] [Originally Added On: May 6th, 2020]
- Tisca Chopra: This time has given me time to think about time - Daijiworld.com [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- Iron-Based Material has the Ability to Power Small Devices - AZoNano [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- How Einstein Failed to Find Flaws in the Copenhagen Interpretation - The Great Courses Daily News [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- Raytheon Technologies Reports First Quarter 2020 Results; Greg Hayes Quoted - ExecutiveBiz [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- Unified Field Theory: Einstein Failed, but What's the Future? - The Great Courses Daily News [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- Einstein Vs. the New Generation of Quantum Theorists - The Great Courses Daily News [Last Updated On: May 7th, 2020] [Originally Added On: May 7th, 2020]
- Why Self-Awareness and Communication Are Key for Self-Taught Players and Luthiers - Premier Guitar [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- Nine graduates head off to continue their higher educational pursuits - Nevada Today [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- 'The Theory of Everything' by Wolfram Gets Criticized by Physicists - Interesting Engineering [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- Cliff's Edge -- The Past Hypothesis - Adventist Review [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- Researchers Have Found a New Way to Convert Waste Heat Into Electricity to Power Small Devices - SciTechDaily [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- Quantum Computing Market New Technology Innovations, Advancements and Global Development Analysis 2020 to 2025 - Cole of Duty [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- Physicist Brian Greene on learning to focus on the here and now - KCRW [Last Updated On: May 10th, 2020] [Originally Added On: May 10th, 2020]
- OK, WTF Are Virtual Particles and Do They Actually Exist? - VICE [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Is the Big Bang in crisis? | Astronomy.com - Astronomy Magazine [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Raytheon Technologies Board of Directors to Take Voluntary Compensation Reduction - PRNewswire [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- What part of 'public' does PSC not get? - The Bozeman Daily Chronicle [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Exploring new tools in string theory - Space.com [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- The Era of Anomalies - Physics [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Registration Open for Inaugural IEEE International Conference on Quantum Computing and Engineering (QCE20) - thepress.net [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Exploring the quantum field, from the sun's core to the Big Bang - MIT News [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- The strange link between the human mind and quantum physics [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- quantum mechanics | Definition, Development, & Equations ... [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Quantum Physics Introduction Made Simple for Beginners [Last Updated On: May 15th, 2020] [Originally Added On: May 15th, 2020]
- Company Hopes to Have Carbon Nanotube COVID-19 Detector Available in June - SciTechDaily [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- The world is not as real as we think. - Patheos [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- Armin Strom Discusses Resonance With PhD Of Quantum Physics And Watch Collector In An Easy-To-Understand Way (Video) - Quill & Pad [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- Teaching the next generation of quantum scientists | Harvard John A. Paulson School of Engineering and Applied Sciences - Harvard School of... [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- Nasa discovers parallel universe where time runs backwards? Know the truth - Business Standard [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- Physicists Just Built The First Working Prototype Of A 'Quantum Radar' - ScienceAlert [Last Updated On: May 23rd, 2020] [Originally Added On: May 23rd, 2020]
- Next-Gen Laser Beams With Up to 10 Petawatts of Power Will Usher In New Era of Relativistic Plasmas Research - SciTechDaily [Last Updated On: May 26th, 2020] [Originally Added On: May 26th, 2020]
- What does the Tenet title mean? Quantum mechanics and Einsteins theory - Explica [Last Updated On: May 26th, 2020] [Originally Added On: May 26th, 2020]
- Looking up: UFO occupants and the legacy of language - Roswell Daily Record [Last Updated On: May 26th, 2020] [Originally Added On: May 26th, 2020]
- This is the light they have discovered and according to scientists it should not exist - Checkersaga [Last Updated On: June 2nd, 2020] [Originally Added On: June 2nd, 2020]
- MIT Student Probing Reality Through Physics, Philosophy and Writing - SciTechDaily [Last Updated On: June 2nd, 2020] [Originally Added On: June 2nd, 2020]
- David Baddiel: Kids have a better sense of humour than they used to' - The Guardian [Last Updated On: June 2nd, 2020] [Originally Added On: June 2nd, 2020]
- Some Information Regarding Medical Physics - - KUSI [Last Updated On: June 2nd, 2020] [Originally Added On: June 2nd, 2020]
- Francesca Vidotto: The Quantum Properties of Space-Time - JSTOR Daily [Last Updated On: June 2nd, 2020] [Originally Added On: June 2nd, 2020]
- These 8 Books Have the Power to Change Your Perspective on Life - Morocco World News [Last Updated On: June 8th, 2020] [Originally Added On: June 8th, 2020]
- Could Every Electron in the Universe Be the Same One? - Interesting Engineering [Last Updated On: June 8th, 2020] [Originally Added On: June 8th, 2020]
- Armijo: The absolute power of love | VailDaily.com - Vail Daily News [Last Updated On: June 8th, 2020] [Originally Added On: June 8th, 2020]
- Scientists predicted that the coronavirus death rate would fall over time, but instead it doubled. Here's why - Business Insider India [Last Updated On: June 13th, 2020] [Originally Added On: June 13th, 2020]
- Sussex Uni physicist creates the fifth state of matter whilst working from home - The Tab [Last Updated On: June 13th, 2020] [Originally Added On: June 13th, 2020]
- Beware of 'Theories of Everything' - Scientific American [Last Updated On: June 13th, 2020] [Originally Added On: June 13th, 2020]
- Duckworth on Education: The Feynman Technique - EMSWorld [Last Updated On: June 13th, 2020] [Originally Added On: June 13th, 2020]
- Scientists Discover Quantum Matter for the First Time in Space - Beebom [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- Physicists May Have Solved Long-Standing Mystery of Matter and Antimatter - SciTechDaily [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- Louis Broglie and the Idea of Wave-Particle Duality - Interesting Engineering [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- Letter reveals the quirky side of Albert Einstein - Chile News | Breaking News, Views, Analysis - The Santiago Times [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- Exploring the Quantum Field, From the Suns Core to the Big Bang at MIT - SciTechDaily [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- 10 of the best non-fiction science books to read right now - New Scientist [Last Updated On: June 14th, 2020] [Originally Added On: June 14th, 2020]
- Quantum material research connecting physicists in Hong Kong, Beijing and Shanghai facilitates discovery of better materials that benefit our society... [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- Flattening The Complexity Of Quantum Circuits - Asian Scientist Magazine [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- Borrowing from robotics, scientists automate mapping of quantum systems - News - The University of Sydney [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- Weird green glow spotted in atmosphere of Mars - Space.com [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- Why Gravity Is Not Like the Other Forces - Quanta Magazine [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- Cedar Hill grad pivots from science to law, determined to help others - The Dallas Morning News [Last Updated On: June 16th, 2020] [Originally Added On: June 16th, 2020]
- The stories a muon could tell - Symmetry magazine [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- In the atmosphere of Mars, a green glow offers scientists hints for future visits - NBCNews.com [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- Birdsong offers clues to the workings of short-term memory - AroundtheO [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- Restructuring cybersecurity with the power of quantum - TechRadar [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- Researchers Use Richard Feynman's Ideas to Develop a Working 'Theory of Everything' - Interesting Engineering [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- Nano-motor of just 16 atoms runs at the boundary of quantum physics - New Atlas [Last Updated On: June 18th, 2020] [Originally Added On: June 18th, 2020]
- 'Everything was centered around Sara, he was lost': Abhishek Kapoor on Sushant Singh Rajput after 'Kedarnath' - DNA India [Last Updated On: June 21st, 2020] [Originally Added On: June 21st, 2020]
- Physicists have proposed a new theory for Bose-Einstein condensates - Tech Explorist [Last Updated On: June 21st, 2020] [Originally Added On: June 21st, 2020]
- 8.13 and 8.14: Physics Junior Lab - MIT Technology Review [Last Updated On: June 21st, 2020] [Originally Added On: June 21st, 2020]
- The Period of the Universe's Clock - Physics [Last Updated On: June 21st, 2020] [Originally Added On: June 21st, 2020]
- If Wormholes Are Actually Going to Work, They'll Need to Look Weird - Yahoo! Voices [Last Updated On: June 25th, 2020] [Originally Added On: June 25th, 2020]
- At Long Last: An Answer to the Mystery Surrounding Matter and Antimatter - SciTechDaily [Last Updated On: June 25th, 2020] [Originally Added On: June 25th, 2020]
- Lost and found in French translation - The Guardian [Last Updated On: June 25th, 2020] [Originally Added On: June 25th, 2020]
- Do we need a 'Quantum Generation'? | TheHill - The Hill [Last Updated On: June 25th, 2020] [Originally Added On: June 25th, 2020]